Inżynieria na styku bitów i atomów.
Zbiór zrealizowanych projektów R&D, od autorskiej elektroniki i oprogramowania firmware w C/C++, po zaawansowane systemy wizyjne.
Zastosowanie kamery 3D do identyfikacji obiektów oraz ich położenia
Cognex, PatMax3D, Time of Flight, TCP/IP, Robotics
Przemysłowy system wizyjny 3D realizujący zadania precyzyjnej lokalizacji obiektów w przestrzeni roboczej robota Mitsubishi.
Technical Overview
Technical Documentation Expansion
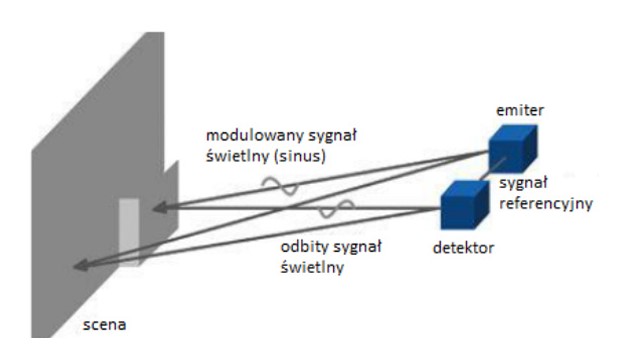
■ FIZYKA POMIARU: TIME OF FLIGHT (TOF)
Metoda polega na precyzyjnym pomiarze czasu, w jakim sygnał świetlny pokonuje drogę do obiektu i z powrotem. Pozwala to na generowanie chmur punktów (Point Clouds) niezależnie od światła zewnętrznego.
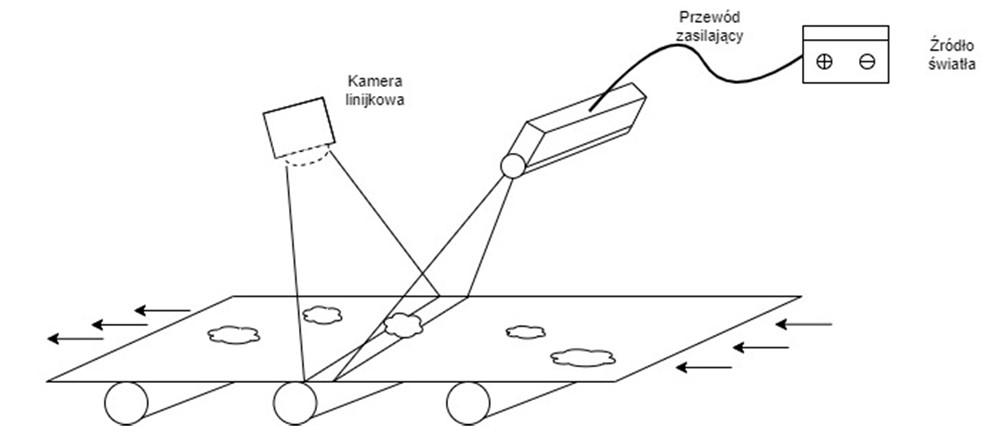
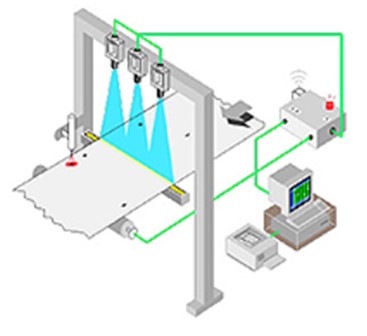
■ AKWIZYCJA PROFILOWA (LINE SCANNING)
System rejestruje pojedyncze linie obrazu synchronicznie z ruchem transportera, co pozwala na rekonstrukcję modeli 3D dużych obiektów bez dystorsji geometrycznej.
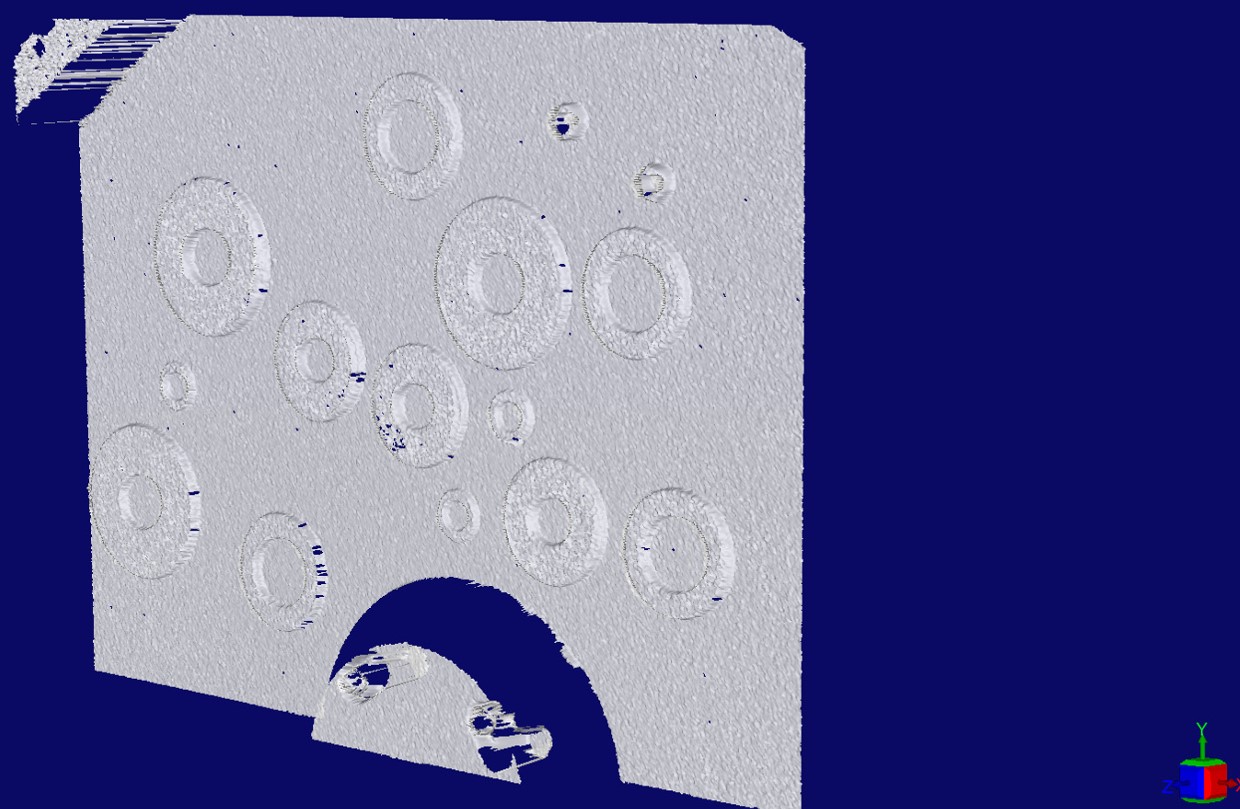
■ ANALIZA CHMURY PUNKTÓW
Gęsta chmura punktów poddana filtracji statystycznej (Statistical Outlier Removal). System wykorzystuje te dane do mapowania geometrycznego detali względem układu współrzędnych kamery.
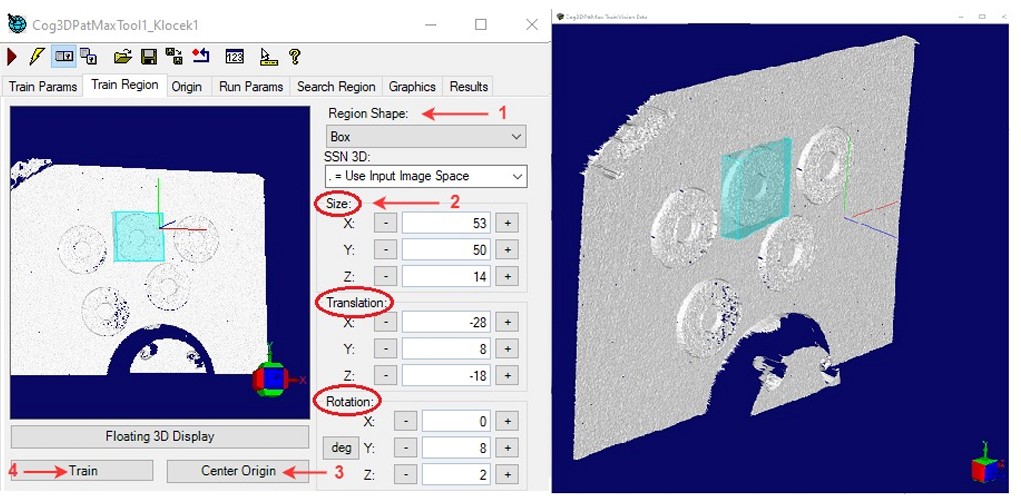
■ KONFIGURACJA PATMAX3D (6DOF POSE ESTIMATION)
Parametryzacja algorytmu w sześciu stopniach swobody (6DoF). System uwzględnia położenie X,Y,Z oraz kąty Pitch, Roll i Yaw, optymalizując chwyt robota.
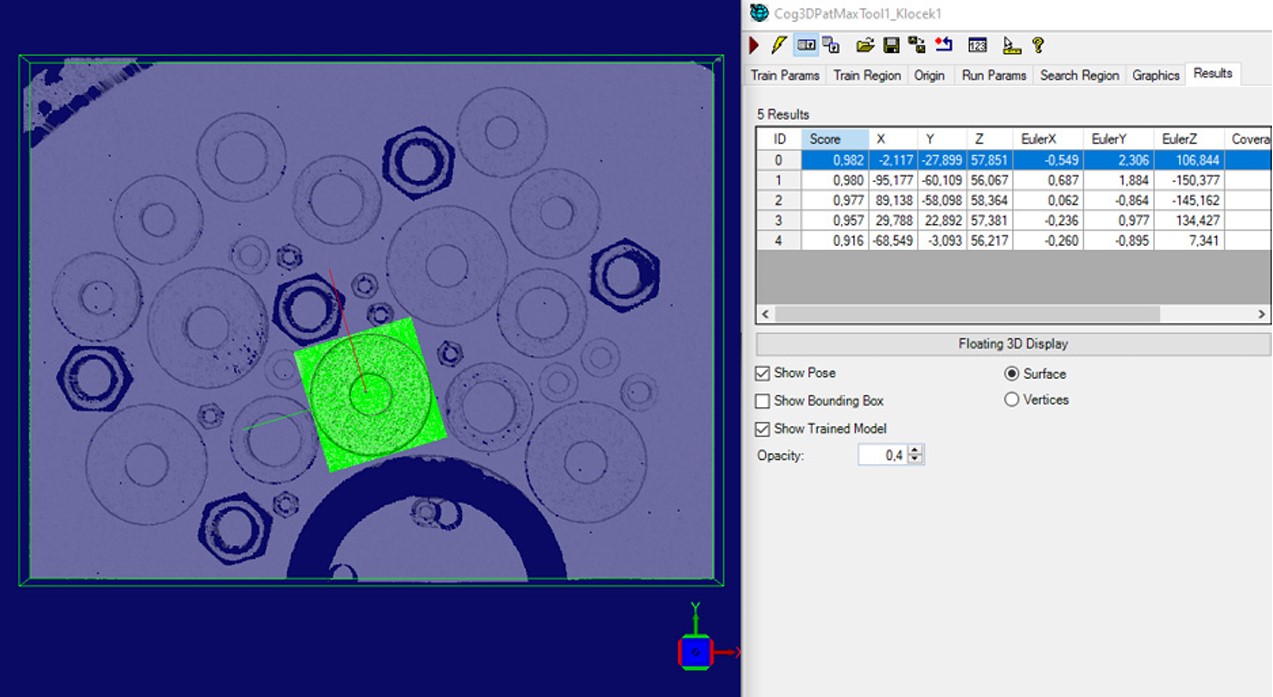
■ WERYFIKACJA POZYCJI (FINAL INSPECTION)
Wizualizacja sukcesu identyfikacji. System nanosi kontur CAD na chmurę punktów i generuje wektor normalny powierzchni dla precyzyjnego podejścia chwytaka.
■ ANALIZA PROFILU 1D
Ultra-szybki tryb inspekcji wykorzystujący przekroje przez mapę wysokości do błyskawicznej weryfikacji obecności komponentów z submilimetrową precyzją.
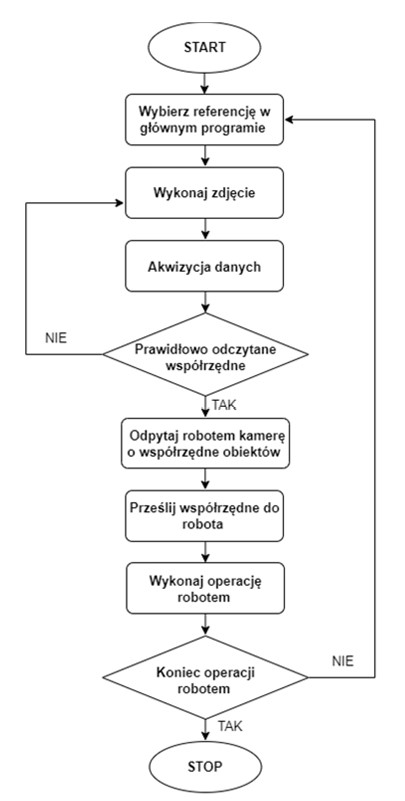
■ LOGIKA KOMUNIKACJI (TCP/IP HANDSHAKE)
Protokół oparty na asynchronicznym gnieździe (Socket). Dane o pozycji (X, Y, Z, R, P, Y) są pakowane w ramkę ASCII i wysyłane do kontrolera robota.
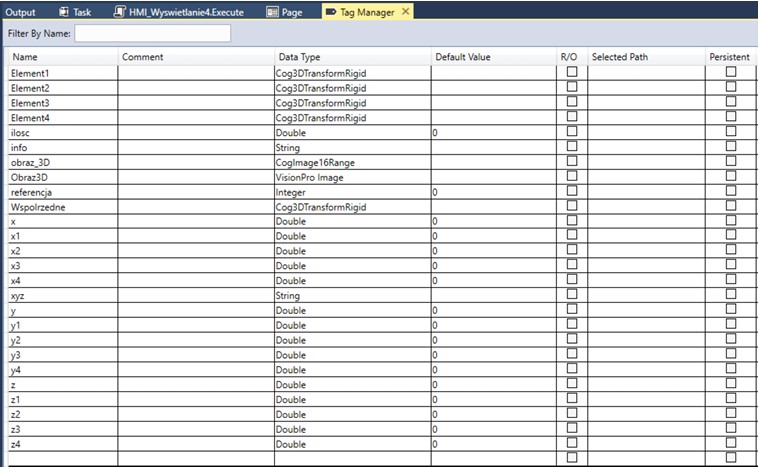
■ MAPOWANIE ZMIENNYCH (DATA ALIASING)
Widok z menedżera tagów Cognex Designer. Wyniki inspekcji są mapowane na zmienne globalne wystawiane do systemów SCADA/MES.
Final Synthesis
System identyfikacji 3D stanowi kamień milowy w automatyzacji elastycznej. Dzięki wyeliminowaniu sztywnego oprzyrządowania mechanicznego na rzecz dynamicznej korekcji wizyjnej, linia produkcyjna uzyskała zdolność do przezbrojenia 'w locie' pod różne typy detali. Badania potwierdziły błąd pozycjonowania (RMS) na poziomie 0.12mm.
Future Roadmap
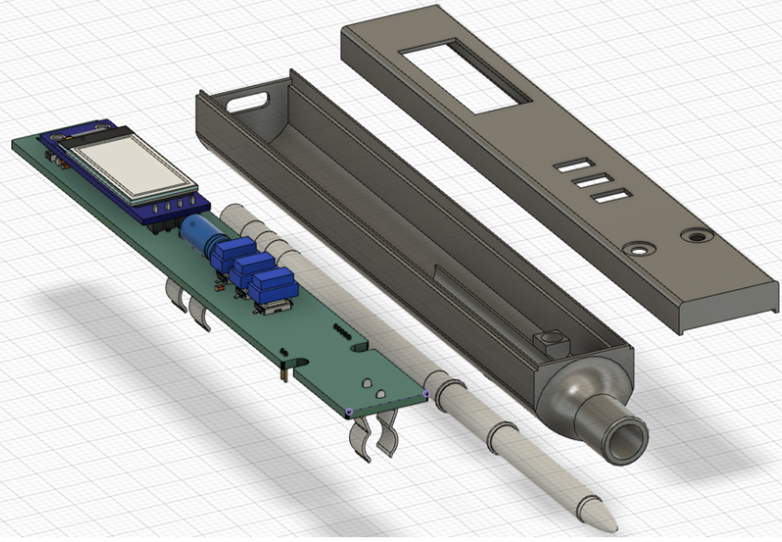
HARDWARE Mobilna Stacja Lutownicza
STM32, C, PID Control, USB-C PD
Kompaktowa stacja lutownicza zasilana przez USB-C (Power Delivery) obsługująca groty T12.
Technical Overview
Visual Assets
Technical Documentation Expansion
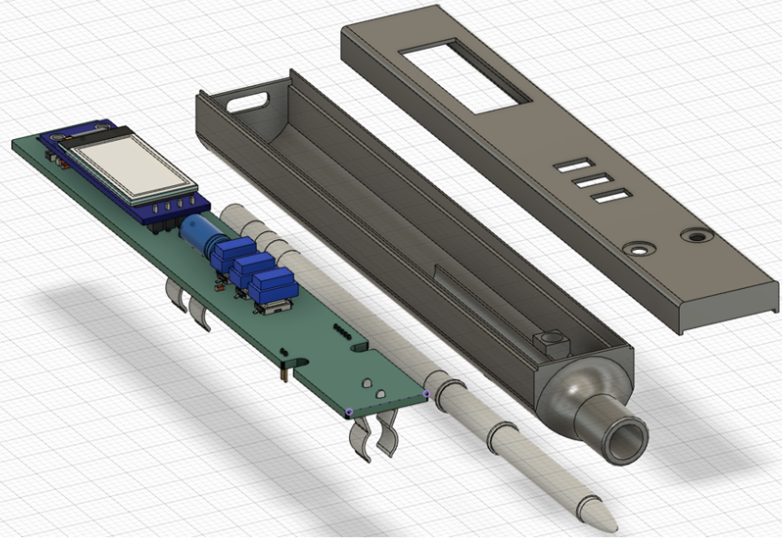
■ CAD_RENDER // FUSION 360 ASSEMBLY
Kompletny model inżynierski uwzględniający dylatację termiczną i ergonomię chwytu.
Final Synthesis
Projekt udowodnił, że nowoczesna elektronika użytkowa może łączyć wysoką moc z mobilnością. Urządzenie stało się codziennym narzędziem w moim warsztacie, oferując parametry porównywalne ze stacjonarnymi stacjami.
Future Roadmap
VISION SYSTEM - System do zliczania osób z re-identyfikacją i śledzeniem
YOLOv11, BotSort, OSNet, PyTorch, Python
Zaawansowany potok przetwarzania wizyjnego (Computer Vision Pipeline) integrujący detekcję, śledzenie wieloobiektowe oraz re-identyfikację osób w czasie rzeczywistym.
Technical Overview
Technical Documentation Expansion
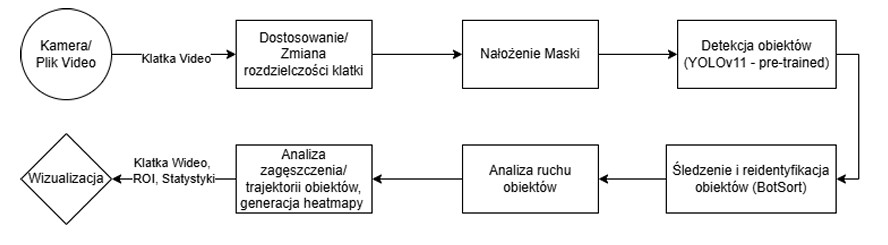
■ ARCHITEKTURA POTOKU (INFERENCE PIPELINE)
Schemat blokowy prezentuje wielowątkowy przepływ danych. Proces rozpoczyna się od dekodowania strumienia RTSP, przechodzi przez normalizację obrazu, asynchroniczną inferencję modelu YOLOv11x, aż po etap filtrowania Kalmana w algorytmie BotSort.
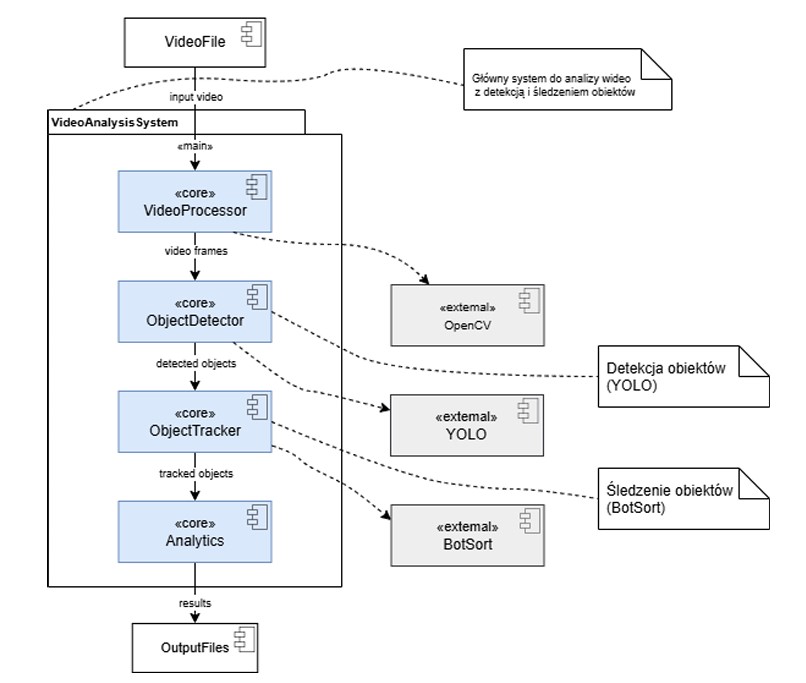
■ STRUKTURA MODULARNA SYSTEMU
Diagram UML komponentów systemu. Wydzielenie warstwy 'Detection Engine' od 'Logic Tracking Controller' umożliwia skalowalność systemu. Komunikacja między modułami odbywa się za pomocą szybkich struktur danych w pamięci współdzielonej.
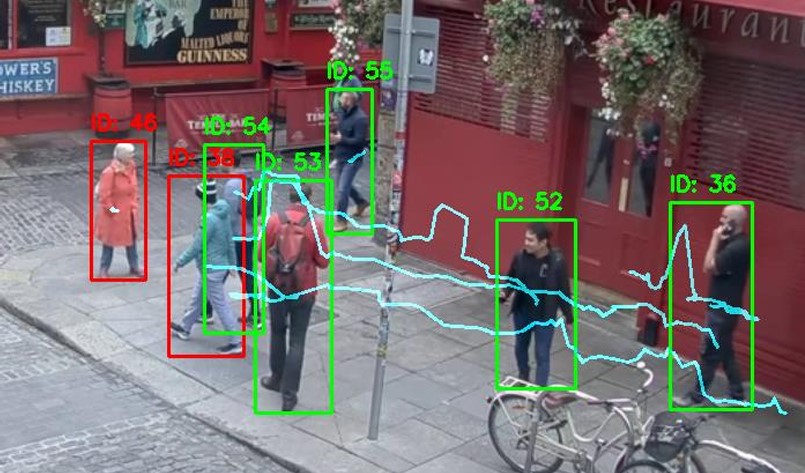
■ ANALIZA VEKTOROWA TRAJEKTORII
Wizualizacja przedstawia historię przemieszczania się unikalnych ID osób. System wykorzystuje akumulację współrzędnych centroidów do generowania map przepływu i wykrywania przejść przez wirtualne bramki.
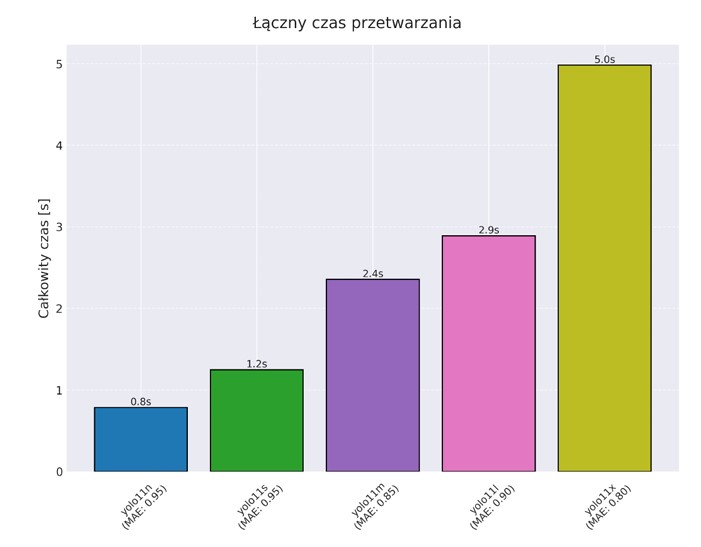
■ EWALUACJA MODELU: PRECISION VS LATENCY
Analiza krzywej kompromisu dla różnych wariantów wag modelu YOLOv11. Badania wykazały, że wersja 'XLarge' oferuje najwyższą odporność na okluzje przy zachowaniu 32ms na klatkę.
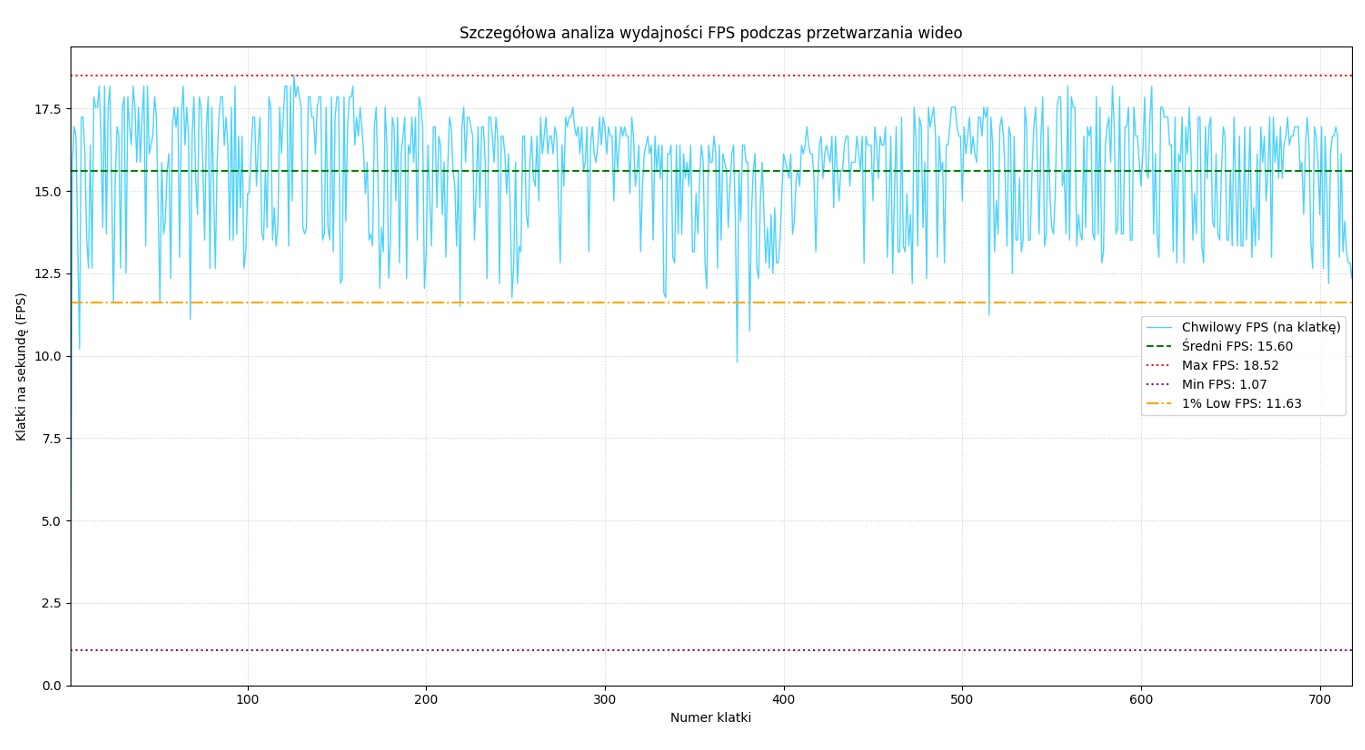
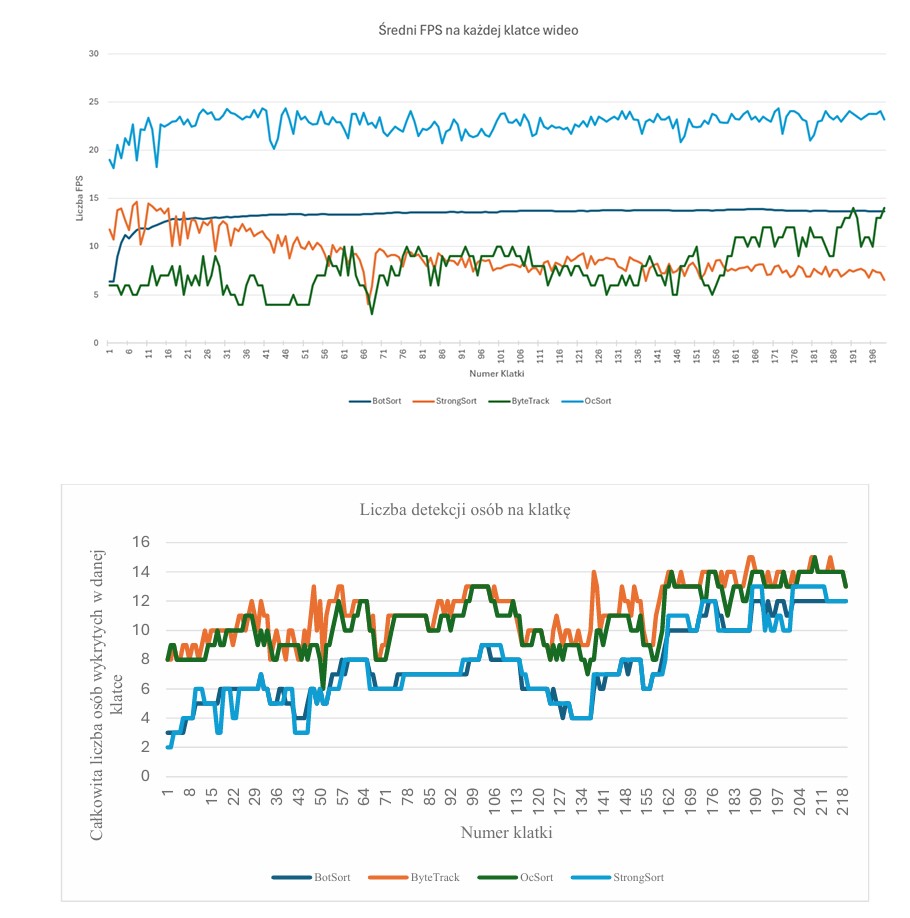
■ STABILNOŚĆ WYDAJNOŚCIOWA
Wykres stabilności klatek na sekundę (FPS). System utrzymuje stały poziom przetwarzania dzięki optymalizacji wątkowej i technice 'batching inference' dla modułu Re-ID.
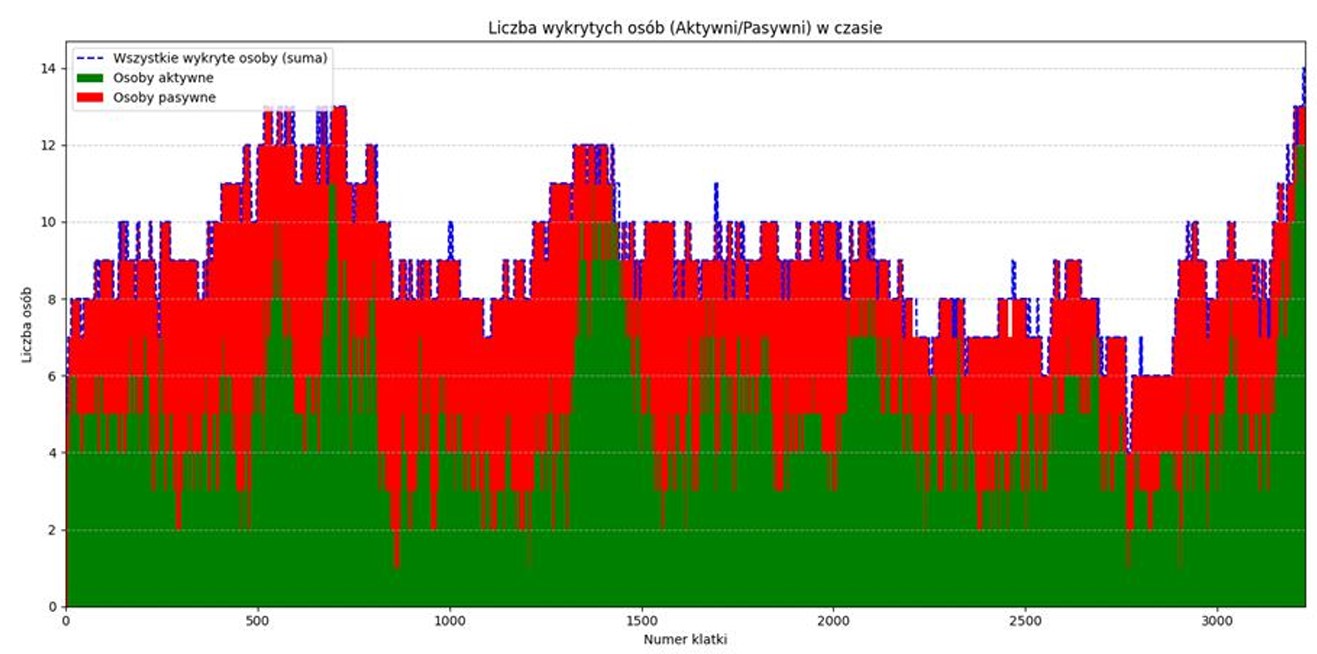
■ ANALIZA DYNAMIKI BEHAWIORALNEJ
System jest w stanie odróżnić osoby przechodzące od osób oczekujących. Pozwala to na generowanie raportów 'Dwell Time' (czas skupienia uwagi).
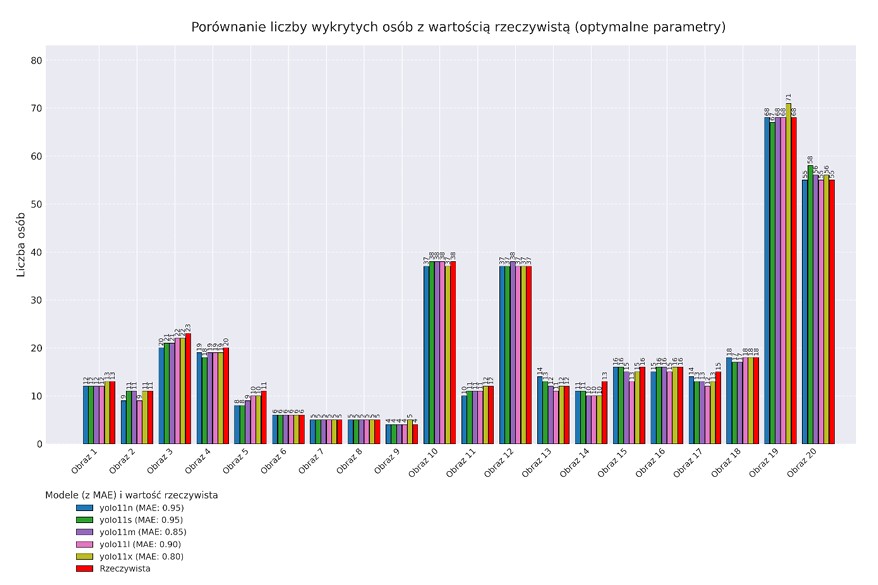
■ WALIDACJA GROUND TRUTH
Zestawienie wyników automatycznego zliczania z ręczną adnotacją ekspercką. Średni błąd bezwzględny (MAE) wynosi poniżej 4% w scenariuszach o wysokim zagęszczeniu tłumu.
■ KORELACJA OBCIĄŻENIA ID VS FRAME-RATE
Log systemowy pokazujący wpływ liczby jednocześnie śledzonych tożsamości na wydajność. Dzięki modelowi OSNet o zredukowanej liczbie parametrów, wzrost liczby unikalnych ID nie powoduje spadków FPS.
Final Synthesis
Obecna wersja systemu stanowi solidną bazę dla inteligentnego monitoringu, osiągając wysoką precyzję detekcji i stabilność śledzenia w czasie rzeczywistym. Wykorzystanie YOLOv11 i BotSort pozwoliło na wyeliminowanie problemów typowych dla prostszych systemów wizyjnych, takich jak gubienie tożsamości po krótkotrwałym przesłonięciu obiektu.