Engineering at the intersection of bits and atoms.
A collection of R&D projects, from custom electronics and C++ firmware to advanced Computer Vision (YOLO/AI) systems.
3D Vision Identification & Pose Estimation System
Cognex, PatMax3D, Time of Flight, TCP/IP, Robotics
Industrial 3D vision system for precision object localization within a Mitsubishi robot workspace.
Technical Overview
Technical Documentation Expansion
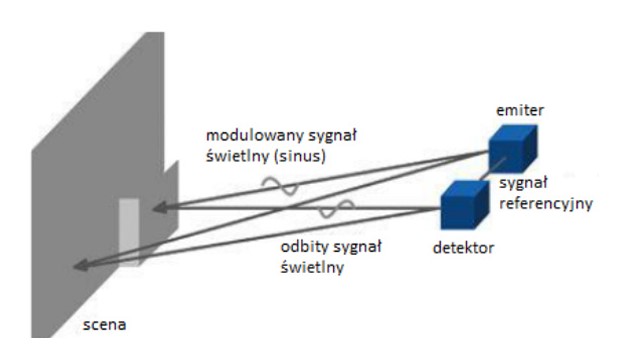
■ FIZYKA POMIARU: TIME OF FLIGHT (TOF)
Metoda polega na precyzyjnym pomiarze czasu, w jakim sygnał świetlny pokonuje drogę do obiektu i z powrotem. Pozwala to na generowanie chmur punktów (Point Clouds) niezależnie od światła zewnętrznego.
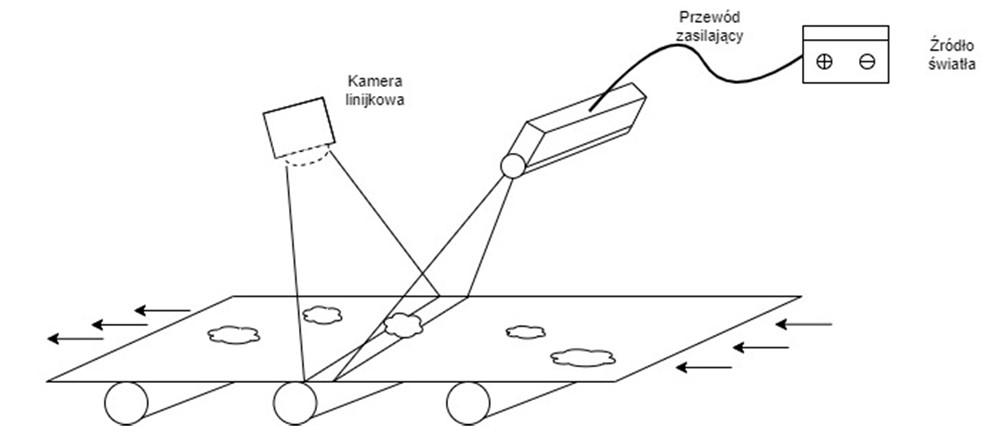
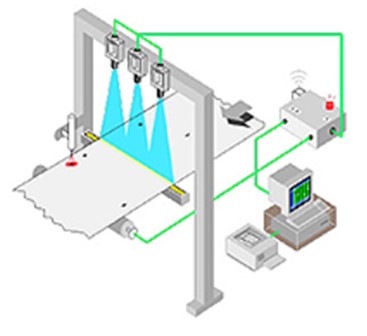
■ AKWIZYCJA PROFILOWA (LINE SCANNING)
System rejestruje pojedyncze linie obrazu synchronicznie z ruchem transportera, co pozwala na rekonstrukcję modeli 3D dużych obiektów bez dystorsji geometrycznej.
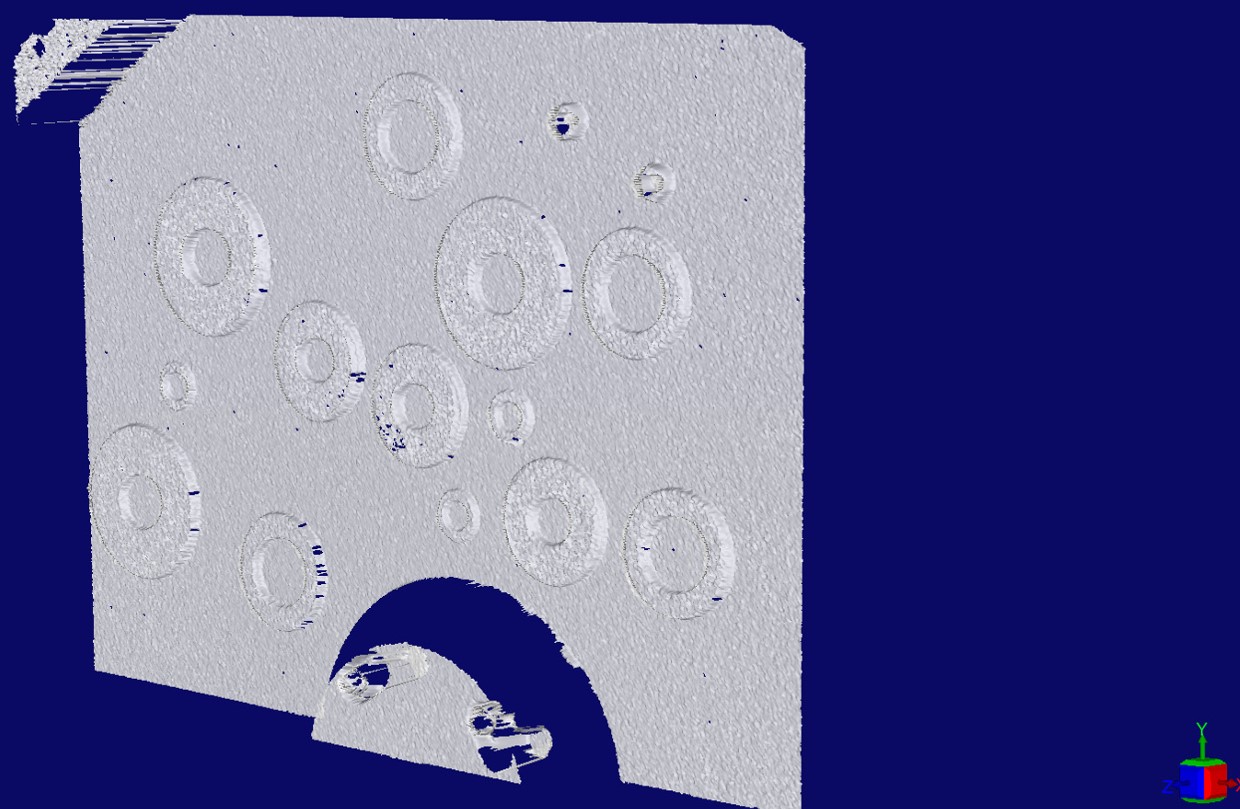
■ ANALIZA CHMURY PUNKTÓW
Gęsta chmura punktów poddana filtracji statystycznej (Statistical Outlier Removal). System wykorzystuje te dane do mapowania geometrycznego detali względem układu współrzędnych kamery.
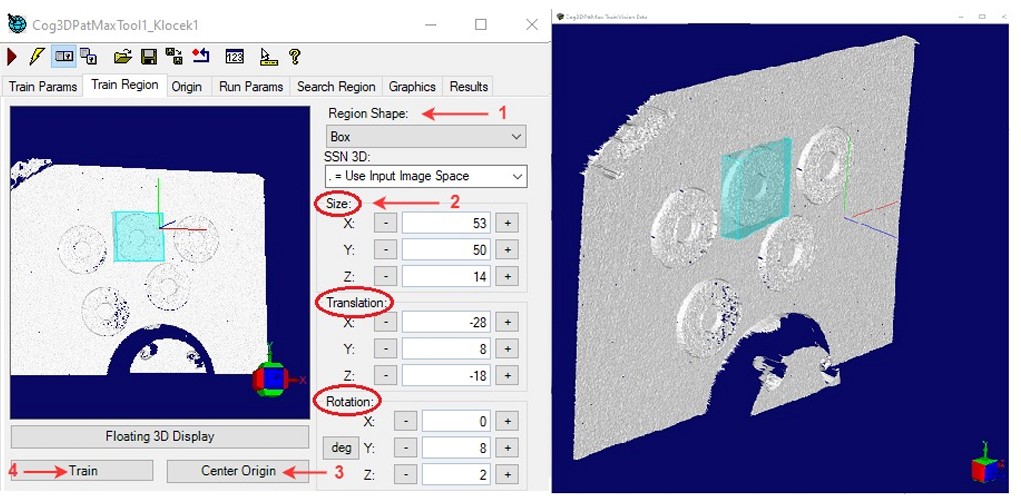
■ KONFIGURACJA PATMAX3D (6DOF POSE ESTIMATION)
Parametryzacja algorytmu w sześciu stopniach swobody (6DoF). System uwzględnia położenie X,Y,Z oraz kąty Pitch, Roll i Yaw, optymalizując chwyt robota.
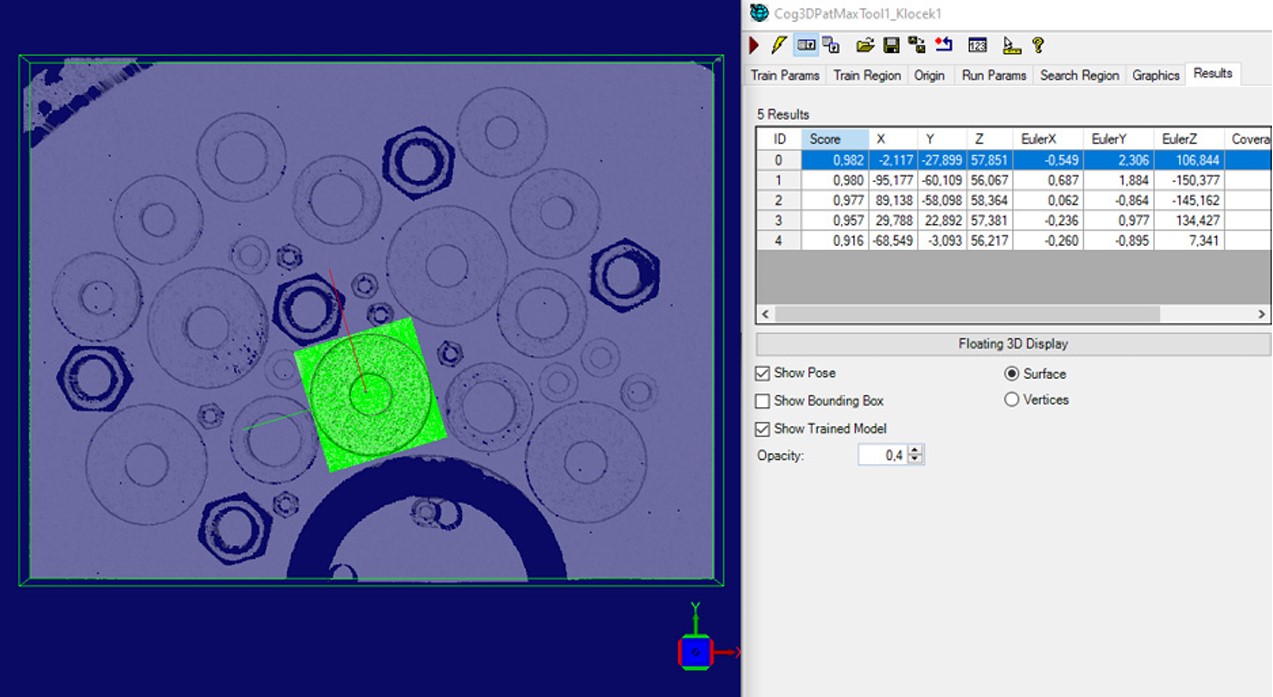
■ WERYFIKACJA POZYCJI (FINAL INSPECTION)
Wizualizacja sukcesu identyfikacji. System nanosi kontur CAD na chmurę punktów i generuje wektor normalny powierzchni dla precyzyjnego podejścia chwytaka.
■ ANALIZA PROFILU 1D
Ultra-szybki tryb inspekcji wykorzystujący przekroje przez mapę wysokości do błyskawicznej weryfikacji obecności komponentów z submilimetrową precyzją.
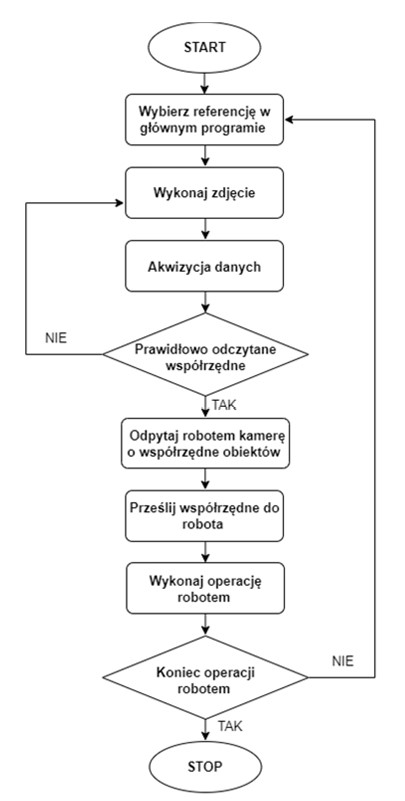
■ LOGIKA KOMUNIKACJI (TCP/IP HANDSHAKE)
Protokół oparty na asynchronicznym gnieździe (Socket). Dane o pozycji (X, Y, Z, R, P, Y) są pakowane w ramkę ASCII i wysyłane do kontrolera robota.
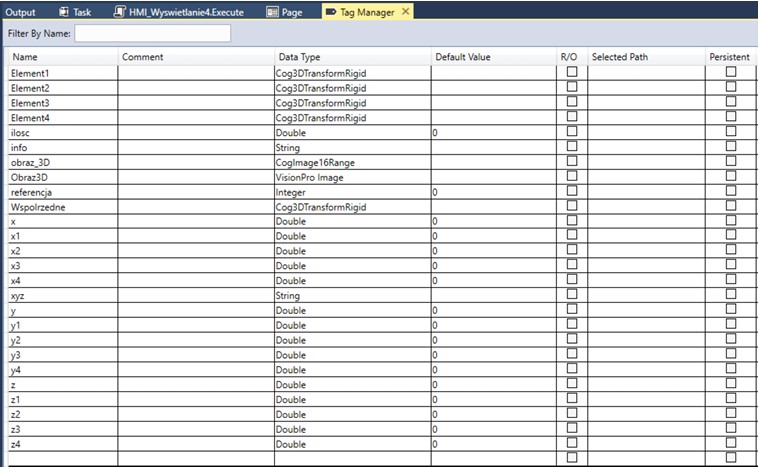
■ MAPOWANIE ZMIENNYCH (DATA ALIASING)
Widok z menedżera tagów Cognex Designer. Wyniki inspekcji są mapowane na zmienne globalne wystawiane do systemów SCADA/MES.
Final Synthesis
The 3D identification system represents a milestone in flexible automation, eliminating rigid mechanical fixtures in favor of dynamic vision-based correction.
Future Roadmap
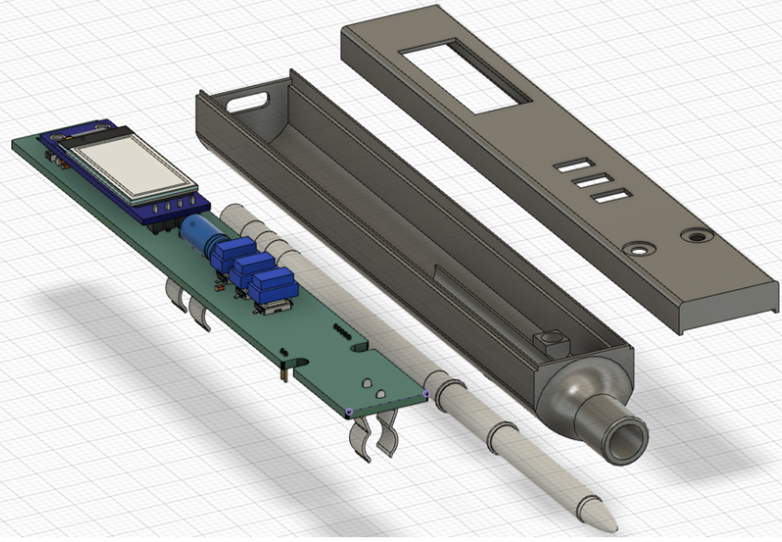
HARDWARE // Mobile Soldering Station
STM32, C, PID Control, USB-C PD
Compact soldering station powered by USB-C (Power Delivery) supporting T12 tips.
Technical Overview
Visual Assets
Technical Documentation Expansion
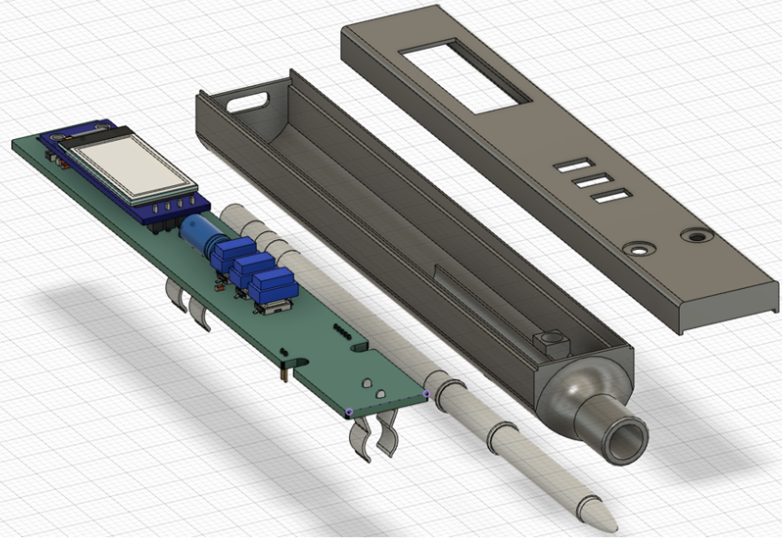
■ CAD_RENDER // FUSION 360 ASSEMBLY
Kompletny model inżynierski uwzględniający dylatację termiczną i ergonomię chwytu.
Final Synthesis
The project proved that modern consumer electronics can combine high power with mobility, rivaling desktop stations from top brands.
Future Roadmap
VISION SYSTEM - AI People Counting & Re-Identification
YOLOv11, BotSort, OSNet, PyTorch, Python
Advanced Computer Vision Pipeline integrating detection, multi-object tracking, and person re-identification in real-time.
Technical Overview
Technical Documentation Expansion
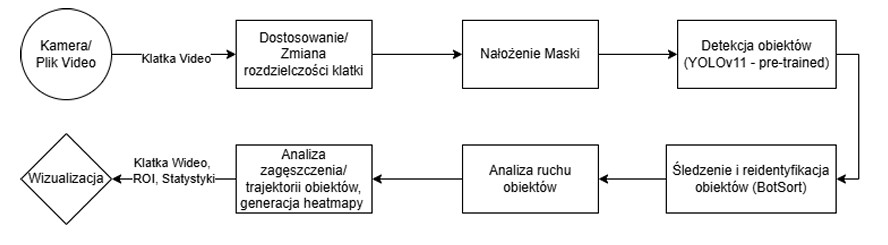
■ ARCHITEKTURA POTOKU (INFERENCE PIPELINE)
Schemat blokowy prezentuje wielowątkowy przepływ danych. Proces rozpoczyna się od dekodowania strumienia RTSP, przechodzi przez normalizację obrazu, asynchroniczną inferencję modelu YOLOv11x, aż po etap filtrowania Kalmana w algorytmie BotSort.
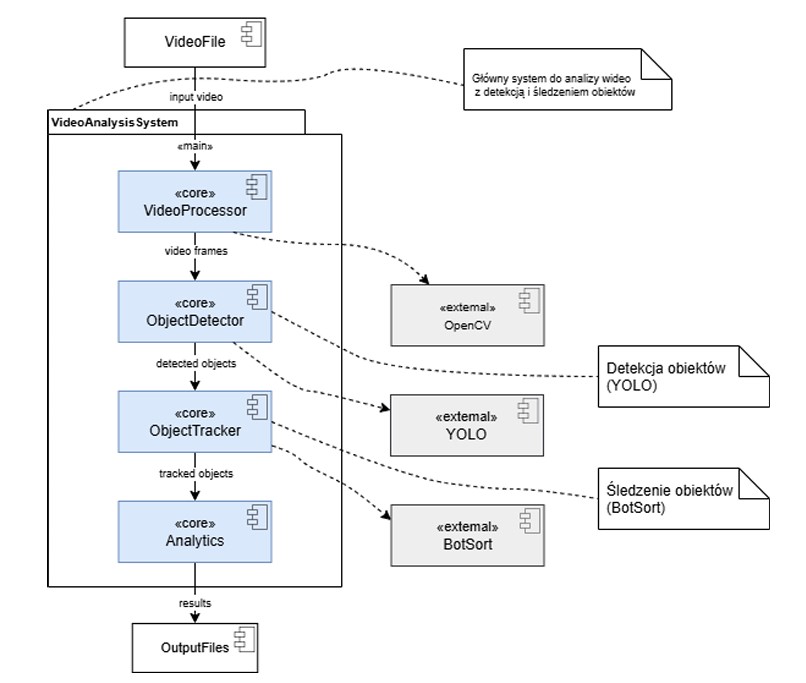
■ STRUKTURA MODULARNA SYSTEMU
Diagram UML komponentów systemu. Wydzielenie warstwy 'Detection Engine' od 'Logic Tracking Controller' umożliwia skalowalność systemu. Komunikacja między modułami odbywa się za pomocą szybkich struktur danych w pamięci współdzielonej.
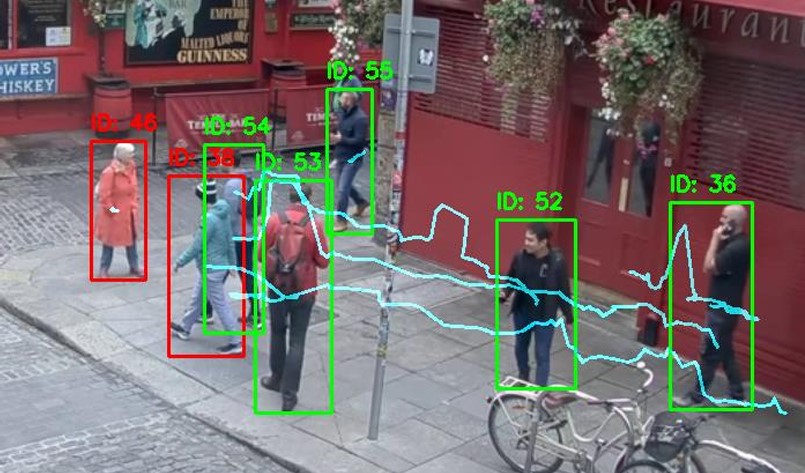
■ ANALIZA VEKTOROWA TRAJEKTORII
Wizualizacja przedstawia historię przemieszczania się unikalnych ID osób. System wykorzystuje akumulację współrzędnych centroidów do generowania map przepływu i wykrywania przejść przez wirtualne bramki.
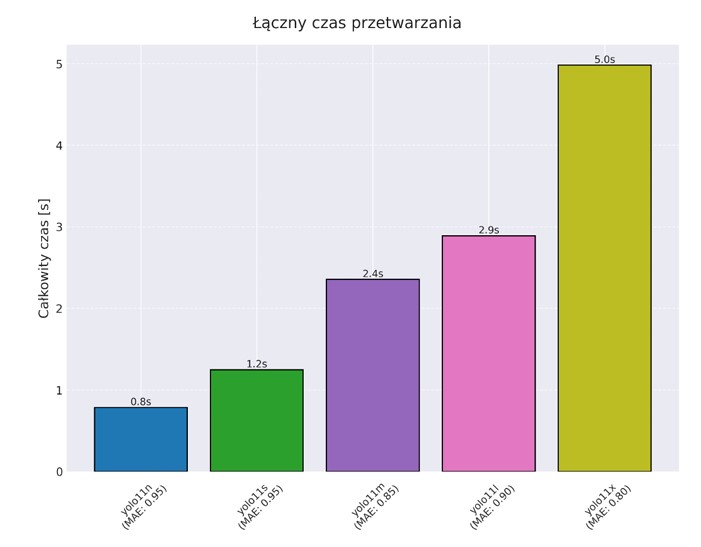
■ EWALUACJA MODELU: PRECISION VS LATENCY
Analiza krzywej kompromisu dla różnych wariantów wag modelu YOLOv11. Badania wykazały, że wersja 'XLarge' oferuje najwyższą odporność na okluzje przy zachowaniu 32ms na klatkę.
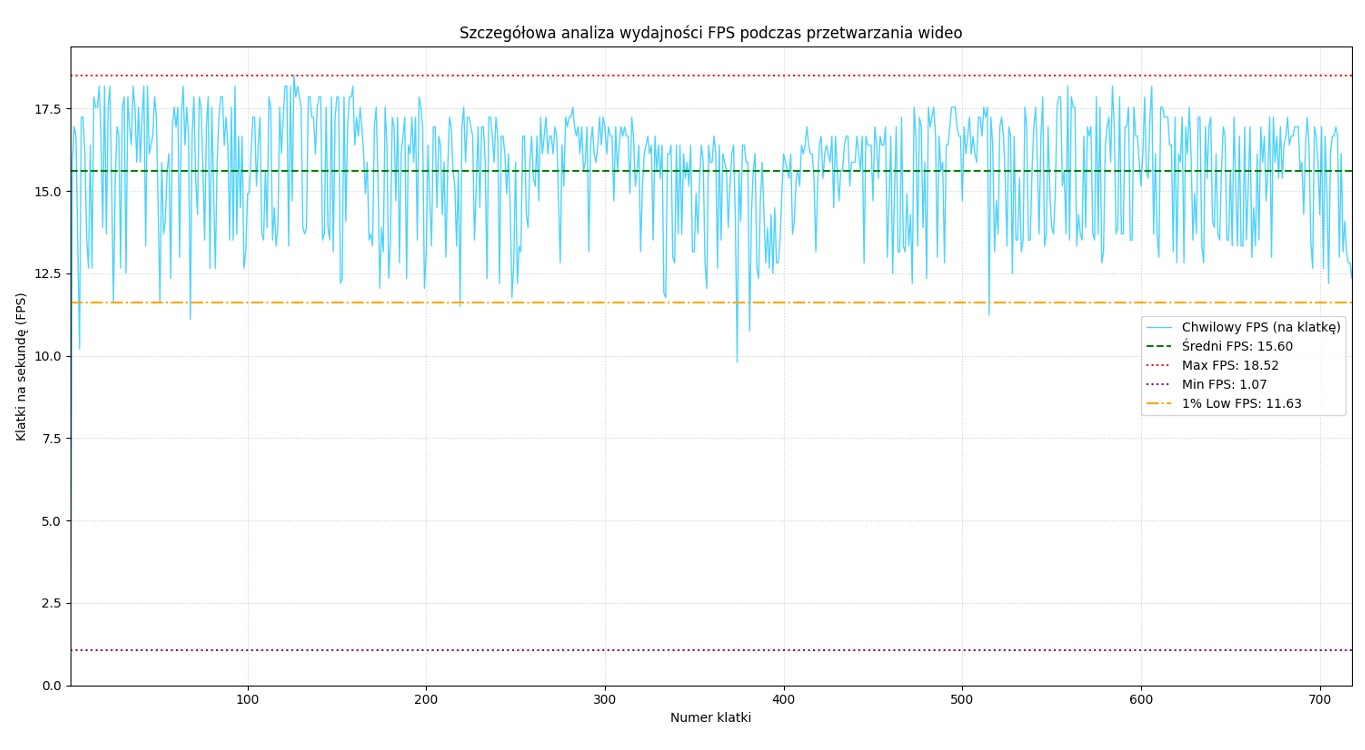
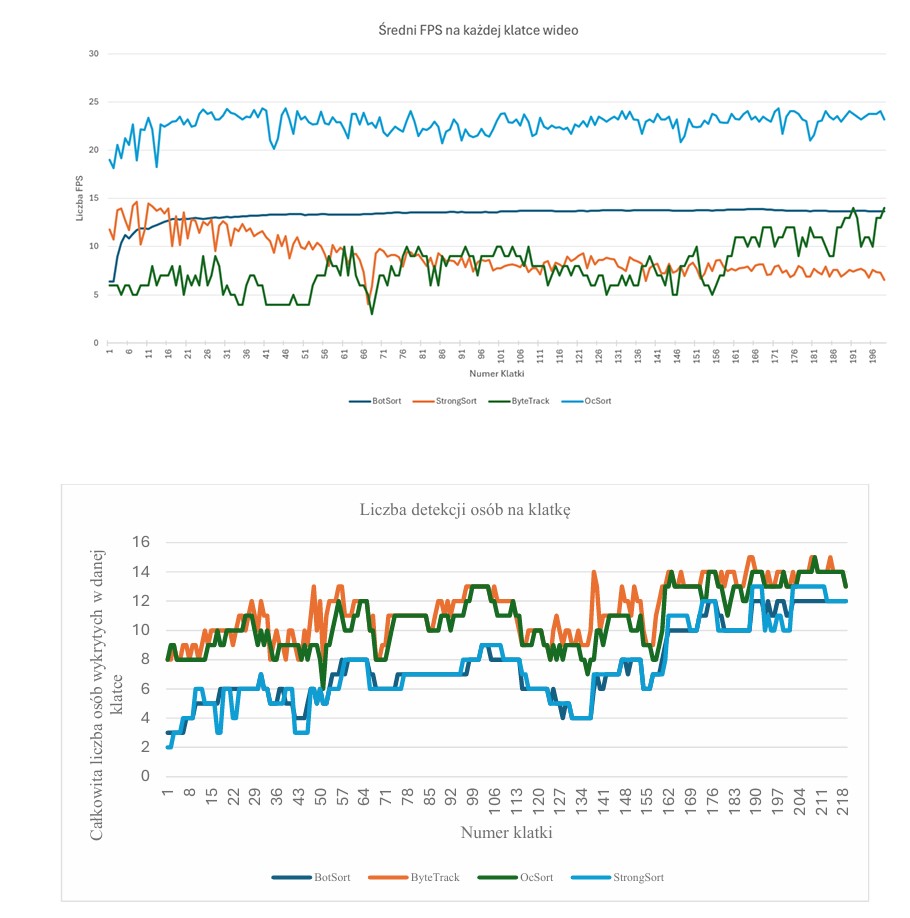
■ STABILNOŚĆ WYDAJNOŚCIOWA
Wykres stabilności klatek na sekundę (FPS). System utrzymuje stały poziom przetwarzania dzięki optymalizacji wątkowej i technice 'batching inference' dla modułu Re-ID.
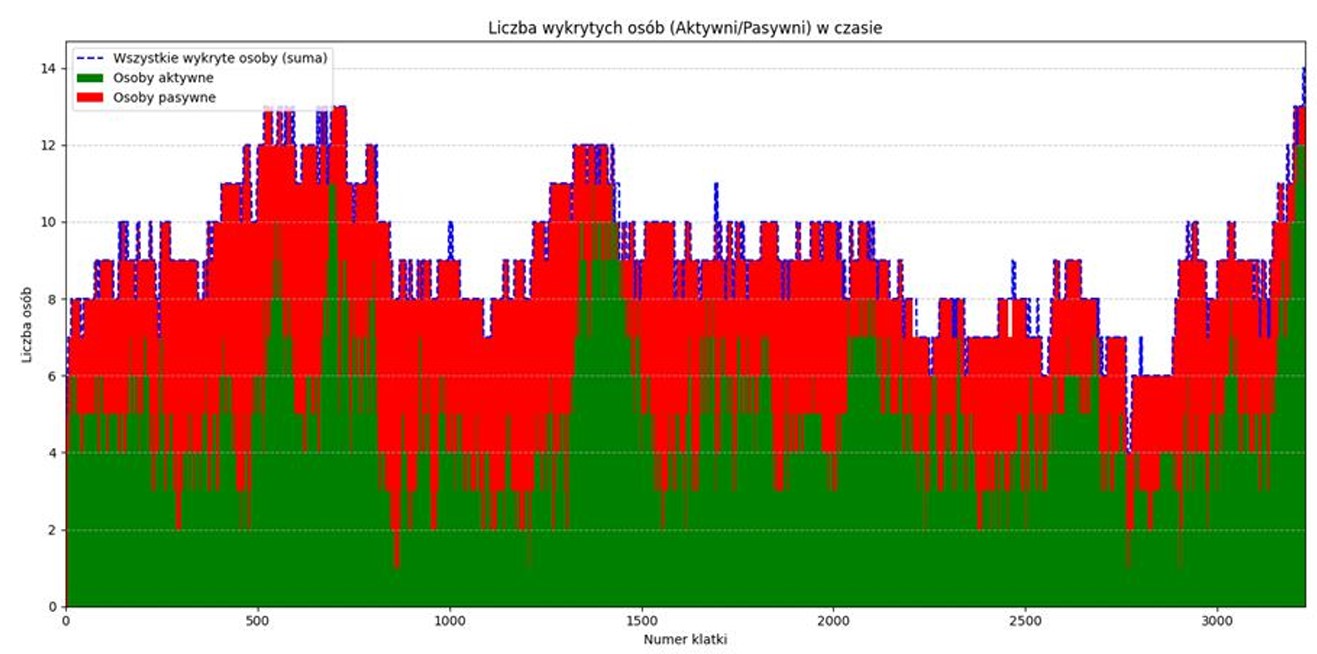
■ ANALIZA DYNAMIKI BEHAWIORALNEJ
System jest w stanie odróżnić osoby przechodzące od osób oczekujących. Pozwala to na generowanie raportów 'Dwell Time' (czas skupienia uwagi).
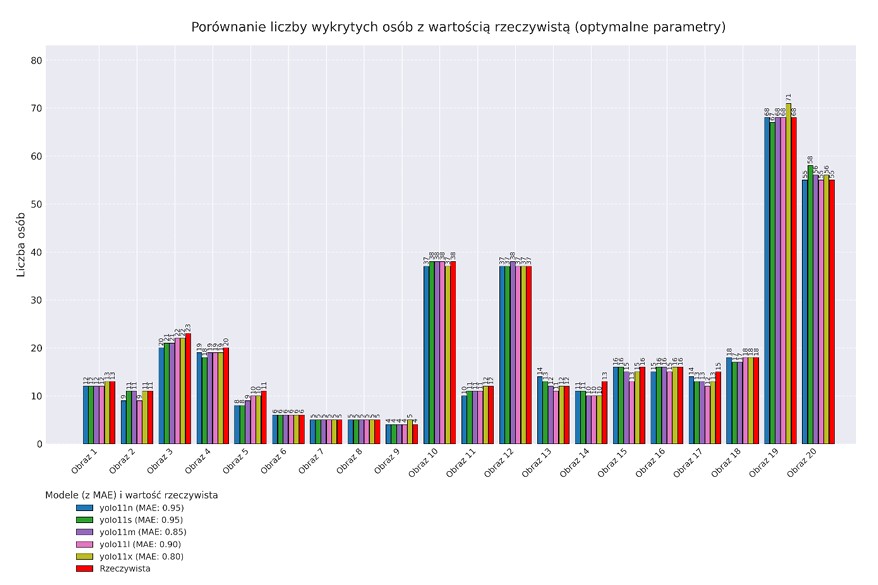
■ WALIDACJA GROUND TRUTH
Zestawienie wyników automatycznego zliczania z ręczną adnotacją ekspercką. Średni błąd bezwzględny (MAE) wynosi poniżej 4% w scenariuszach o wysokim zagęszczeniu tłumu.
■ KORELACJA OBCIĄŻENIA ID VS FRAME-RATE
Log systemowy pokazujący wpływ liczby jednocześnie śledzonych tożsamości na wydajność. Dzięki modelowi OSNet o zredukowanej liczbie parametrów, wzrost liczby unikalnych ID nie powoduje spadków FPS.
Final Synthesis
The current version of the system provides a solid foundation for intelligent monitoring, achieving high detection precision and real-time tracking stability.